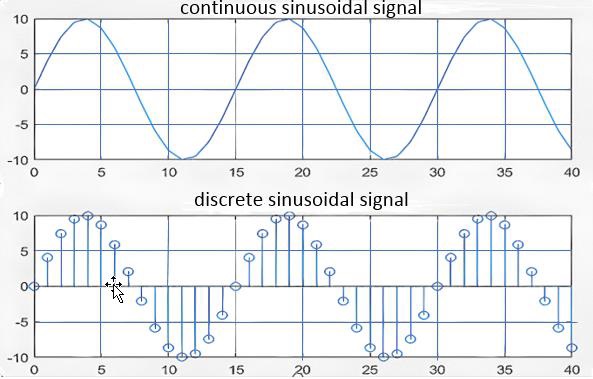
1.1 Continuous versus discrete signal representations:
Nowadays the information processing tools, i.e. computers, are digital and correspondingly, the signals and images in computers are digital as well, i.e. they are represented by numbers. However, most of real-world phenomena are continuous. Think about the activity of the heart. It is unceasing and there are comprehensive processes of life importance that must be monitored and analyzed as need arises. Usually, heart activity is recorded from the electropotentials it generates. Electrodes are placed on the body surface to map those potentials into electrical signals for subsequent digital storage, transmittance, or analysis. The first step in cardio-signal processing is to sample the continuous electrocardio-signal into a sequence of numbers representing the signal at discrete time instants. The sampling and acquisition device has to be designed to catch all the important information concerning the state of the heart, i.e. the sampling interval has to be short enough. We say that such a device has a sufficient time resolution, even though it is finite and determined by the sampling interval.
Another example is the process of taking digital images. Here, the continuous picture is focused on a finite-size matrix of discrete diodes which measure the local light intensity and color of the object being registered. We say that the image is defined on a discrete grid. A good imaging system has to achieve as high spatial resolution as possible, but again it is finite since bounded by the optical system and the grid density of the diode matrix.
There are many tasks in which we have to deal with the signal at other than the grid coordinates. Among these, are the affine transformations (translation, rotation, rescaling), image zooming, re-slicing of 3D medical images, some multimedia artistic effects, etc. They all demand an arbitrary grid change that in general is continuous processing. Other tasks require operators, which are continuously defined only, e.g. derivatives. To obtain full benefit from the digitalized signal and images, and from the effective sampling and acquisition, we need to have an effective tool for the reverse process as well. We have to be able to reconstruct the original signal to some extent in order to process it continuously. Usually this is done by fitting an adequate continuous model over the given discrete data. A reasonable approach is to consider this model right at the sampling step, that is the sampling should be performed in such a way that allows further continuous modeling. Mathematically, the need for continuous processing using discrete data leads to the specification of the signal space under consideration as generated by a proper continuous and finite-dimensional basis system.
1.2 Scope:
This design of adequate bases and their application to a number of signal and image processing applications.
Spline-like bases are studied for their use in arbitrary-scale image interpolation and decimation. For these applications, an important issue is to achieve high computational efficiency. For this purpose, the designed kernels are chosen to be one-dimensional (1-D) and with a minimal support. The two-dimensional (2-D) processing is achieved by a tensor product of two successive 1-D operations, i.e. processing by separable kernels. Correspondingly, all notations in the thesis are for the 1-D case. The emphasis is put on the design of suitable interpolation kernels, hence optimization techniques working in the Fourier domain and based on well-justified goodness measures are applied to improve the interpolation performance. Once good interpolation (reconstruction) basis has been designed, the image decimation (down-sizing) is performed in a least squares manner using the biorthogonal basis. Again, computational efficiency is targeted in a near-optimal approach.